import numpy as np
import matplotlib.pyplot as plt
from pyapprox.util.backends.numpy import NumpyBkd
from pyapprox_benchmarks.sensitivity import IshigamiBenchmark
from pyapprox.surrogates.gaussianprocess import ExactGaussianProcess
from pyapprox.surrogates.kernels.base import SeparableProductKernel
from pyapprox.surrogates.kernels.matern import SquaredExponentialKernel
from pyapprox.surrogates.gaussianprocess.fitters import (
GPMaximumLikelihoodFitter,
)
bkd = NumpyBkd()
np.random.seed(42)
# Load benchmark
benchmark = IshigamiBenchmark(bkd)
func = benchmark.problem().function()
prior = benchmark.problem().prior()
marginals = prior.marginals()
nvars = 3
gt_main = bkd.to_numpy(benchmark.main_effects()).flatten()
gt_total = bkd.to_numpy(benchmark.total_effects()).flatten()GP-Based Sensitivity Analysis
PyApprox Tutorial Library
Computing Sobol indices analytically from GP kernel integrals and verifying against fix-and-freeze estimates.
TipDownload Notebook
Learning Objectives
After completing this tutorial, you will be able to:
- Use
GaussianProcessSensitivityto compute Sobol indices from kernel integrals - Explain how conditional variances from the GP posterior yield Sobol indices
- Verify GP-based indices against sample-based fix-and-freeze (Saltelli/Jansen) estimates
- Assess accuracy by comparing both methods against known analytical ground truth
Prerequisites
Complete:
- Sensitivity Analysis — variance decomposition and Sobol index definitions
- Building a GP Surrogate — GP fitting basics
How GP Sensitivity Analysis Works
Why a separable kernel?
All the GP-based UQ and sensitivity formulas require integrating the kernel function over the input distribution \(\rho(\boldsymbol{\xi})\). A generic \(D\)-dimensional kernel integral
\[ \int k(\boldsymbol{\xi}, \boldsymbol{\xi}^{(i)})\, \rho(\boldsymbol{\xi})\,\dd\boldsymbol{\xi} \]
would require \(D\)-dimensional quadrature, which is intractable for even moderate \(D\). With a separable product kernel \(k(\boldsymbol{\xi}, \boldsymbol{\xi}') = \prod_{d=1}^{D} k_d(\xi_d, \xi_d')\) and independent marginals \(\rho = \prod_d \rho_d\), this integral factors into a product of \(D\) cheap one-dimensional integrals:
\[ \int k(\boldsymbol{\xi}, \boldsymbol{\xi}^{(i)})\,\rho(\boldsymbol{\xi})\,\dd\boldsymbol{\xi} = \prod_{d=1}^{D} \int k_d(\xi_d, \xi_d^{(i)})\,\rho_d(\xi_d)\,\dd\xi_d \]
Each 1D integral is computed to machine precision with a small Gauss quadrature rule (e.g., 20–30 points). This factorisation is the sole reason a separable kernel is required: it turns intractable multivariate integrals into products of 1D quadrature sums.
From conditional variances to Sobol indices
For a GP with posterior mean \(\mu^*(\boldsymbol{\xi})\) and posterior variance \(\gamma_f(\boldsymbol{\xi}) = \sigma^{*2}(\boldsymbol{\xi})\) (the GP’s pointwise uncertainty about the true function value), Sobol indices can be computed analytically by integrating conditional variances over the input distribution.
The key idea is that the conditional variance — the variance of the GP mean when a subset of inputs \(\boldsymbol{\xi}_p\) is held fixed and the remaining inputs are integrated out — equals the ANOVA variance component for that subset:
\[ V_p = \E_{\boldsymbol{\xi}_{\sim p}}\bigl[ \Var_{\boldsymbol{\xi}_p}[\mu^*(\boldsymbol{\xi}) \mid \boldsymbol{\xi}_{\sim p}] \bigr] = \boldsymbol{\alpha}^\top P_p \boldsymbol{\alpha} - (\boldsymbol{\tau}^\top \boldsymbol{\alpha})^2 \]
where \(P_p\) is the conditional P matrix: for dimensions in \(p\) the entries are kernel evaluations at the training points, while for the remaining dimensions the kernel is integrated against \(\rho\). Thanks to separability, \(P_p\) factors into products of 1D integrals — each either a kernel evaluation or a 1D quadrature sum — so the entire matrix is cheap to assemble.
The first-order and total-effect Sobol indices are then:
\[ \Sobol{i} = \frac{V_{\{i\}}}{\Var_{\boldsymbol{\xi}}[\mu^*(\boldsymbol{\xi})]}, \qquad \SobolT{i} = 1 - \frac{V_{\sim\{i\}}}{\Var_{\boldsymbol{\xi}}[\mu^*(\boldsymbol{\xi})]} \]
where \(V_{\{i\}}\) conditions on variable \(i\) alone, \(V_{\sim\{i\}}\) conditions on all variables except \(i\), and \(\Var_{\boldsymbol{\xi}}[\mu^*(\boldsymbol{\xi})]\) is the total variance of the GP posterior mean under the input distribution.
Setup
We use the Ishigami benchmark, a standard 3-variable test function with known analytical Sobol indices:
\[ f(x_1, x_2, x_3) = \sin(x_1) + 7\sin^2(x_2) + 0.1\, x_3^4 \sin(x_1) \]
ImportantSeparable kernel required
As explained above, the analytical formulas require a separable product kernel so that all multivariate kernel integrals reduce to products of 1D Gauss quadrature sums. We use a SeparableProductKernel composed of independent 1D squared-exponential kernels, one per input dimension.
# Fit GP with separable SE kernel
kernels = [
SquaredExponentialKernel([1.0], (0.01, 20.0), 1, bkd)
for _ in range(nvars)
]
kernel = SeparableProductKernel(kernels, bkd)
gp = ExactGaussianProcess(kernel, nvars=nvars, bkd=bkd, nugget=1e-8)
N_train = 1500
X_train = prior.rvs(N_train)
y_train = func(X_train)
fitter = GPMaximumLikelihoodFitter(bkd)
result = fitter.fit(gp, X_train, y_train)
gp = result.surrogate()
# Verify accuracy
np.random.seed(123)
X_test = prior.rvs(2000)
y_test = func(X_test)
y_pred = gp.predict(X_test)
rel_rmse = float(bkd.to_numpy(
bkd.sqrt(bkd.mean((y_test - y_pred)**2)) / bkd.sqrt(bkd.mean(y_test**2))
))GP Kernel-Integral Sobol Indices
The GaussianProcessSensitivity class wraps a GaussianProcessStatistics object and computes Sobol indices from the conditional P matrices described above.
from pyapprox.surrogates.sparsegrids.basis_factory import (
create_basis_factories,
)
from pyapprox.surrogates.gaussianprocess.statistics import (
SeparableKernelIntegralCalculator,
GaussianProcessStatistics,
GaussianProcessSensitivity,
)
# Build integral calculator with Gauss-Legendre quadrature (uniform inputs)
nquad = 30
factories = create_basis_factories(marginals, bkd, "gauss")
bases = [f.create_basis() for f in factories]
for b in bases:
b.set_nterms(nquad)
calc = SeparableKernelIntegralCalculator(gp, bases, marginals, bkd=bkd)
stats = GaussianProcessStatistics(gp, calc)
sens = GaussianProcessSensitivity(stats)
# Main effects (first-order indices)
main_effects_gp = sens.main_effect_indices() # Dict[int, Array]
total_effects_gp = sens.total_effect_indices() # Dict[int, Array]
S1_gp = np.array([float(bkd.to_numpy(main_effects_gp[d])) for d in range(nvars)])
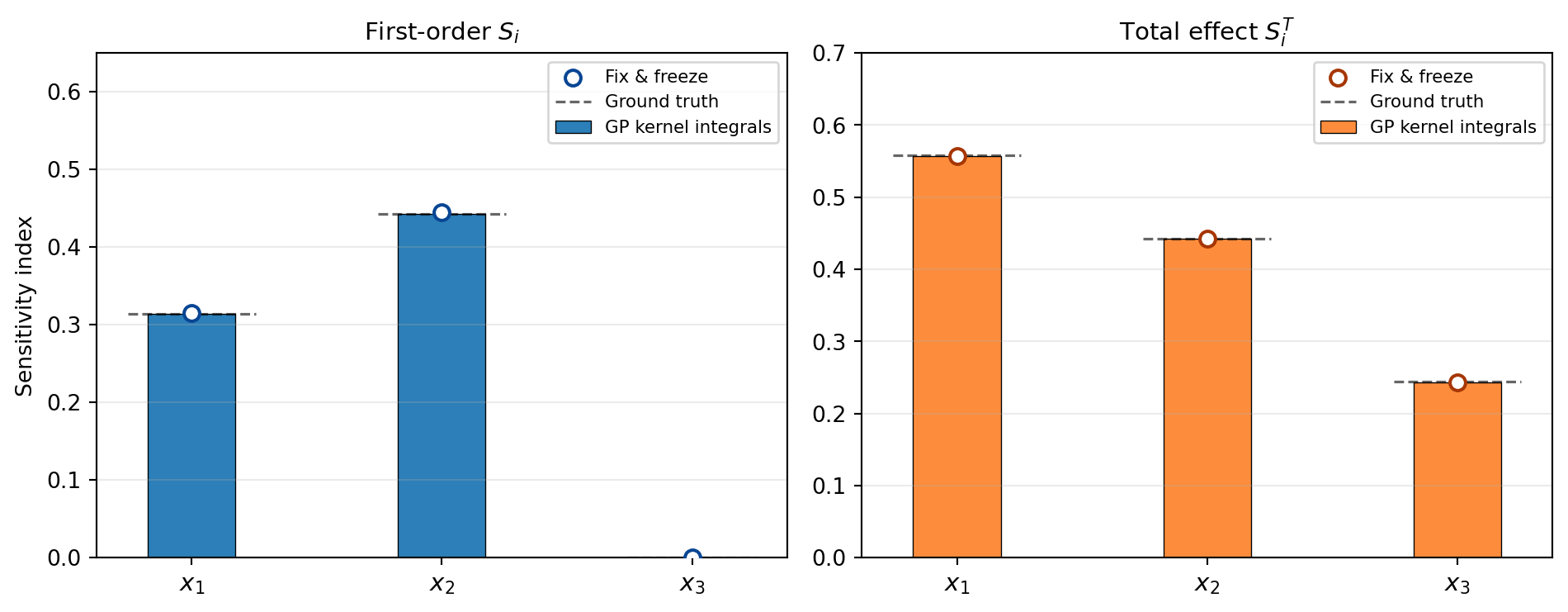
ST_gp = np.array([float(bkd.to_numpy(total_effects_gp[d])) for d in range(nvars)])Note that \(\Sobol{3} \approx 0\) (no main effect for \(x_3\)) but \(\SobolT{3} > 0\) (due to the \(x_1 x_3\) interaction term \(0.1\,x_3^4\sin(x_1)\)).
Sobol Indices of the Posterior Mean
The indices computed above include the GP’s epistemic uncertainty — the denominator \(\Var_{\boldsymbol{\xi}}[\mu^*]\) accounts for the fact that the GP is uncertain about the true function. An alternative is to treat the posterior mean \(\mu^*\) as a deterministic surrogate and compute its Sobol indices directly:
\[ \Sobol{i}^{(\mathrm{pm})} = \frac{\Var_{\xi_i}[\E_{\boldsymbol{\xi}_{\sim i}}[\mu^*]]} {\Var_{\boldsymbol{\xi}}[\mu^*]} \]
where the denominator is the spatial variance of the posterior mean, input_variance_of_posterior_mean(). When the GP fits well (posterior variance small everywhere in the input domain), these indices agree closely with the epistemic versions above.
# Posterior-mean Sobol indices
main_pm = sens.main_effect_indices_of_posterior_mean()
total_pm = sens.total_effect_indices_of_posterior_mean()
S1_pm = np.array([float(bkd.to_numpy(main_pm[d])) for d in range(nvars)])
ST_pm = np.array([float(bkd.to_numpy(total_pm[d])) for d in range(nvars)])
# Compare to epistemic indices
print("Main effects: epistemic vs posterior-mean")
for d in range(nvars):
print(f" x_{d}: {S1_gp[d]:.4f} vs {S1_pm[d]:.4f}")Main effects: epistemic vs posterior-mean
x_0: 0.3140 vs 0.3140
x_1: 0.4428 vs 0.4428
x_2: 0.0000 vs 0.0000Fix-and-Freeze Verification
As an independent check, we compute Sobol indices via the Saltelli/Jansen fix-and-freeze estimator, evaluating the GP surrogate at the Saltelli sample matrices. Since the GP is cheap to evaluate, this uses the surrogate in place of the true model.
from pyapprox.sensitivity import SobolSequenceSensitivityAnalysis
sa = SobolSequenceSensitivityAnalysis(prior, bkd, seed=42)
sa_samples = sa.generate_samples(8192) # (nvars, 8192*(2+nvars))
sa_values = gp.predict(sa_samples) # (1, nsamples_total)
sa.compute(sa_values)
S1_ff = bkd.to_numpy(sa.main_effects())[:, 0]
ST_ff = bkd.to_numpy(sa.total_effects())[:, 0]Comparison
Both methods — GP kernel integrals and fix-and-freeze — agree closely with the known analytical values. Figure 1 shows both estimates side-by-side.
Variability of GP Sobol Indices
The kernel-integral formulas above give point estimates \(\Sobol{i} = V_{\{i\}} / \Var_{\boldsymbol{\xi}}[\mu^*]\). But the GP posterior is uncertain about the true function, so the Sobol indices themselves are random variables. How much would \(\Sobol{i}\) change if we drew a different function from the GP posterior?
Ensemble approach
The GaussianProcessEnsemble class answers this question by sampling GP realizations and computing Sobol indices for each one:
Draw \(R\) function realizations from the GP posterior using the reparameterization trick: \[ f^{(r)}(\boldsymbol{\xi}) = \mu^*(\boldsymbol{\xi}) + L\,\boldsymbol{\varepsilon}^{(r)}, \qquad \boldsymbol{\varepsilon}^{(r)} \sim \mathcal{N}(\mathbf{0}, I) \] where \(L\) is the Cholesky factor of the posterior covariance \(\Sigma^* = k(\boldsymbol{\xi}, \boldsymbol{\xi}') - \mathbf{k}^{*\top} K^{-1} \mathbf{k}^*\) evaluated at a set of Monte Carlo integration points.
For each realization \(r\), estimate the total variance and conditional variances by Monte Carlo integration: \[ \gamma_f^{(r)} = \int [f^{(r)}]^2\,\rho\,\dd\boldsymbol{\xi} - \Bigl(\int f^{(r)}\,\rho\,\dd\boldsymbol{\xi}\Bigr)^2, \qquad V_i^{(r)} = \Var_{\xi_i}\!\bigl[\E_{\boldsymbol{\xi}_{\sim i}}[f^{(r)} \mid \xi_i]\bigr] \]
Compute the Sobol index for each realization: \(\Sobol{i}^{(r)} = V_i^{(r)} / \gamma_f^{(r)}\).
The empirical distribution of \(\{\Sobol{i}^{(r)}\}_{r=1}^{R}\) gives the mean, standard deviation, and confidence intervals for each Sobol index.
NoteWhy not use the analytical point estimate directly?
The analytical formula computes \(\E[\Sobol{i}]\) only approximately, because \(\Sobol{i} = V_i / \gamma_f\) is a ratio of random variables and \(\E[V_i / \gamma_f] \neq \E[V_i] / \E[\gamma_f]\) (Jensen’s inequality). The ensemble approach evaluates the ratio for each realization, correctly capturing the full distribution including any skewness.
from pyapprox.surrogates.gaussianprocess.statistics import (
GaussianProcessEnsemble,
)
ensemble = GaussianProcessEnsemble(gp, sens)
S_dist = ensemble.sobol_distribution_refit(
n_realizations=500,
n_sample_points=800,
seed=42,
)from pyapprox_tutorials.figures._gp import plot_sobol_distribution
fig, axes = plt.subplots(1, nvars, figsize=(12, 3.5), sharey=True)
plot_sobol_distribution(axes, nvars, S_dist, gt_main, bkd)
plt.suptitle("GP posterior uncertainty in Sobol indices", fontsize=11, y=1.02)
plt.tight_layout()
plt.show()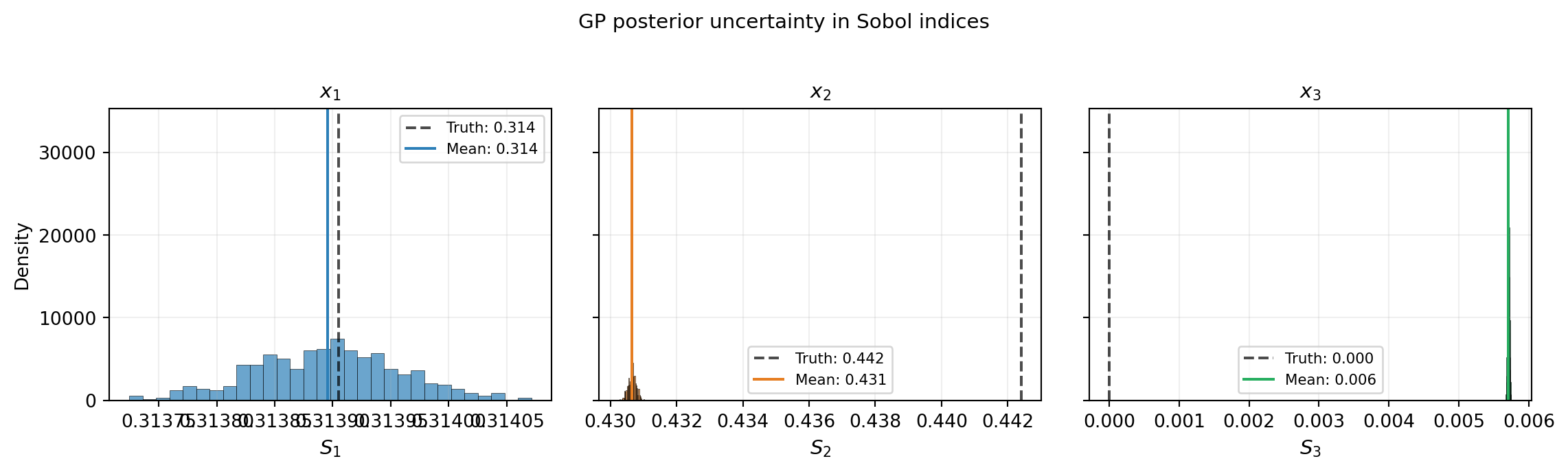
Key Takeaways
GaussianProcessSensitivitycomputes Sobol indices analytically from GP kernel integrals — no additional sampling needed beyond the training data- The method requires a separable product kernel so that all multivariate kernel integrals reduce to products of cheap 1D quadrature sums
- GP kernel-integral indices agree closely with sample-based fix-and-freeze estimates, confirming the analytical formulas are correctly implemented
GaussianProcessEnsemblequantifies the uncertainty in the Sobol indices themselves by sampling GP realizations and computing the index distribution- Like PCE-based sensitivity, index accuracy depends on how well the GP approximates the true function
Exercises
(Easy) Reduce the training set from \(N=1500\) to \(N=200\). How do the GP-based Sobol indices change? Are the fix-and-freeze estimates more or less robust to the reduced GP accuracy?
(Medium) Use
sens.conditional_variance(index)directly to compute the second-order interaction index \(\Sobol{13}\). Verify it matches the known value \(S_{13} \approx 0.244\).(Challenge) Compare the GP sensitivity results against PCE-based sensitivity for the same Ishigami function (see PCE Sensitivity). Which surrogate needs fewer training points to achieve accurate Sobol indices?
Next Steps
- PCE-Based Sensitivity — Analogous Sobol analysis from polynomial chaos expansion coefficients
- UQ with Gaussian Processes — Analytical moments and marginal densities from GP kernel integrals
- Morris Screening — Cheap screening to identify important inputs before Sobol analysis