Writing input files#
Both the eig_calc.py and network_opt.py scripts take an input
file that specifies the configuration for that run.
Each are .dat files where each line specifies
a different configuration variable.
Input for eig_calc.py#
The input file for eig_cal.py is structured:
Line Number |
Description |
Example |
|---|---|---|
Line 1 |
Number of synthetic events to test |
32 |
Line 2 |
Number of possible events in the event space |
8192 |
Line 3 |
Number of realizations of data per event |
2 |
Line 4 |
Boundary information filename: |
|
Line 5 |
Path to |
|
Line 6 |
Sensor 1: Lat, Long, SNR offset, Length of sensor output vec, sensor type |
|
Line 7 |
Sensor 2: Lat, Long, SNR offset, Length of sensor output vec, sensor type |
|
… |
||
Line 5+N |
Sensor N: Lat, Long, SNR offset, Length of sensor output vec, sensor type |
|
For details on the sensor options, see Sensors.
Note that for HPC simulations, the number of synthetic events to test
and number of possible events in the event space must be divisible by
the number of cores. For example this configuration is valid if ncores
= 1,2,4,8,16, or 32. Also note that
synthetic events * possible events * realizations
must be less than 2147483647 due to MPI constraints.
Input for network_opt.py#
Line Number |
Description |
Example |
|---|---|---|
Line 1 |
Number of random initial sensors used to build Gaussian process model |
8 |
Line 2 |
Number of sensors to test during each optimization level |
40 |
Line 3 |
Filename of |
|
Line 4 |
Fixed Sensor Parameters: SNR offset (see Sensors, length of sensor output vector, sensor type |
|
Line 5 |
Optimization Objective (Currently only |
|
Line 6 |
Number of synthetic events to test |
512 |
Line 7 |
Number of possible events in the event space |
|
Line 8 |
Number of realizations of data per event |
|
Line 9 |
Filename of |
|
Line 10 |
MPI string used to run |
|
Line 11 |
Path to file containing sampling functions and pdfs for both prior distribution and importance distribution |
|
Line 12 |
Number of sensors to add e.g. number of optimization levels |
|
Line 13 |
Sensor 1: Lat, Long, SNR offset, Length of sensor output vec, Sensor type |
|
Line 14 |
Sensor 2: Lat, Long, SNR offset, Length of sensor output vec, Sensor type |
|
… |
||
Line 16+N |
Sensor N: Lat, Long, SNR offset, Length of sensor output vec, Sensor type |
|
For details on the sensor options, see Sensors.
This code will take initial set of N sensors defined by this list and
then iteratively add the number of sensors defined by line 12 (this
example asks for 20 sensors to be placed) to the existing network. Note
that for HPC simulations, the number of synthetic events to test and
number of possible events in the event space must be divisible by the
number of cores. For example this configuration is valid if ncores is
a power of 2 up to 512. Also note that
synthetic events * possible events * realizations
must be less than 2147483647 due to MPI constraints.
Sensors#
Each sensor is parameterized by a 5 variables:
Variable |
Description |
Position in vector |
|---|---|---|
Latitude |
The latitude coordinate of the sensor |
1 |
Longitude |
The longitude coordinate of the sensor |
2 |
SNR offset |
How much to offset the sensor’s signal-to-noise ratio (SNR) by (see \ref{subsubsec:snr_offset}) |
3 |
Length of sensor output vector |
Denotes how many output variables the sensor generates. All sensor types currently generate 4 output variables: a detection and an arrival time, so this value should be set at |
4 |
Sensor type |
Indicates what type of sensor models will be used (see \ref{subsubsec:sensor_type}). Currently values of |
5 |
The 5th variable, sensor type, currently has 4 options:
Numerical option |
Sensor type |
Description |
|---|---|---|
|
Seismic sensor |
Generates arrival time and detection data based on seismic waves |
|
Instant arrival sensor |
Uses the same models as type |
|
Infrasound sensor |
Generates arrival time, detection data, azimuth angles, and incident angles based on infrasound waves |
|
Seismic array |
Generates arrival time and detection data based on seismic waves and azimuth angles and incident angles based on infrasound waves |
SNR Offset#
For any given sensor/event pair, a signal-to-noise ratio (SNR) is calculated based on the sensor type. For seismic sensors and arrays, the SNR is calculated according to:
where \(m\) is magnitude and \(\Delta\) is the distance in kilometers between source and receiver [@velasco]. For infrasound sensors, the SNR is calculated according to the ratio between two different models for peak pressure (see the AFTAC and LANL models in [@Stevens2002]).
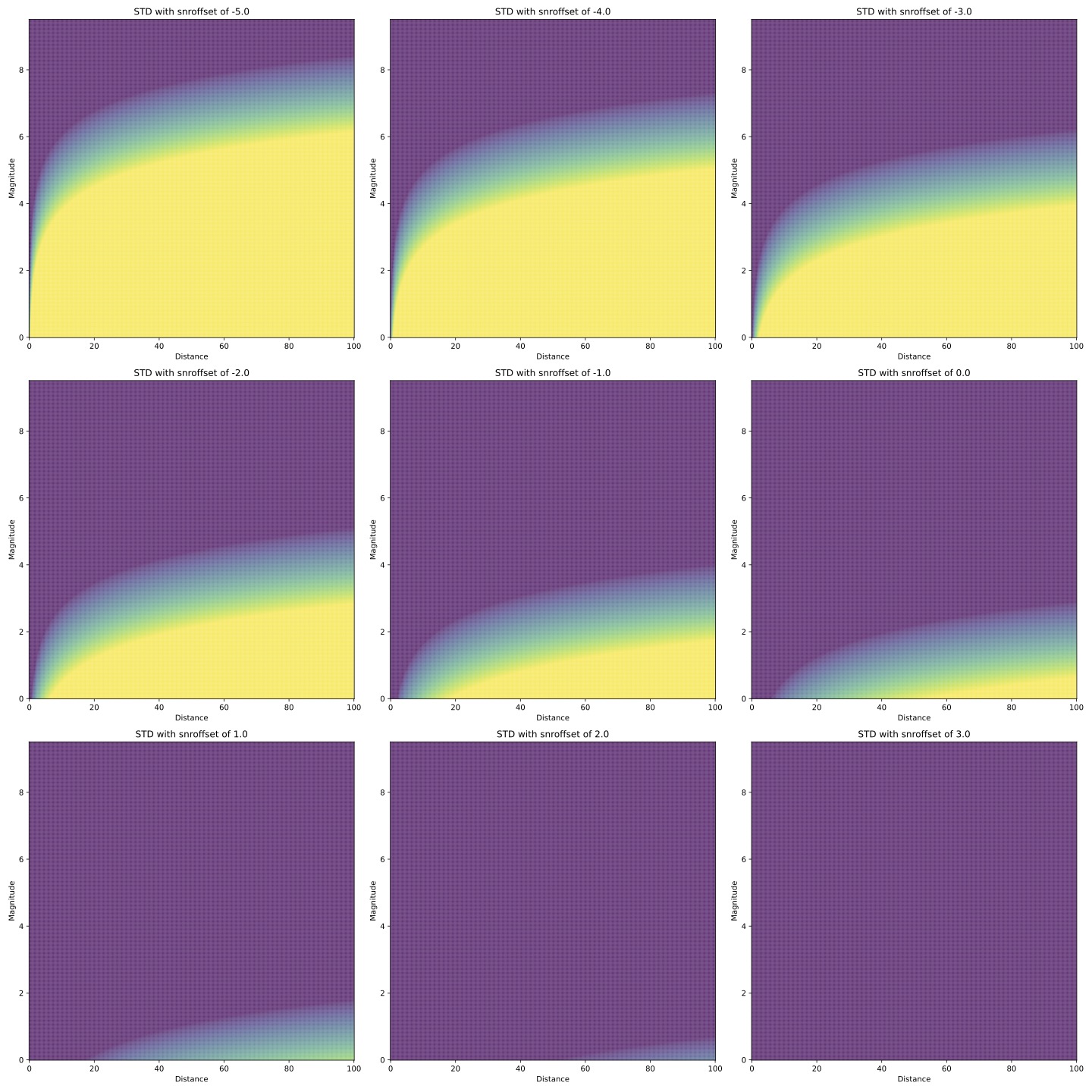
This augmented SNR is then converted to a standard deviation for use in a normal distribution modeling arrival times according to the following equation:
where \(\gamma\), \(t_U\) and \(t_L\), and \(\sigma_0\) may all be tuned as hyperparameters. The values for these hyperparameters are currently set as:
By tuning the sensor fidelity, which can be specified in the sensor
parameters in either the eig_calc.py input file or the network_opt.py
input file, the user can control the measurement
error used to model arrival times.
This table provides a notional description of how the measurement error changes as the SNR offset is changed. The first column shows the offset value, and the second two columns show the average measurement error across all events sampled from the given prior for sensors with the given offset. It appears that between values of 1.73 and -0.64, the average measurement error is more sensitive to changes in SNR.
SNR offset |
\(\sigma_{meas}\), uniform prior |
\(\sigma_{meas}\), nonuniform prior |
|---|---|---|
3.5 |
0.1 |
0.1 |
2.91 |
0.1 |
0.1 |
2.32 |
0.13 |
0.15 |
1.73 |
0.23 |
0.38 |
1.14 |
0.41 |
0.75 |
0.55 |
0.62 |
1.19 |
-0.05 |
0.81 |
1.5 |
-0.64 |
0.92 |
1.83 |
-1.23 |
0.97 |
1.94 |
-1.82 |
0.99 |
1.98 |
-2.41 |
1.0 |
1.99 |
-3.0 |
1.0 |
2.0 |
The figure below shows how the chosen snroffset value of a sensor translates to a measurement error
when using a uniform prior.