Tutorial 1 - WaveBot
The goal of this tutorial is to familiarize new users with how to set up and run optimization problems using WecOptTool. This tutorial uses a one-body WEC, the WaveBot, in one degree of freedom in regular waves.

At the end of this tutorial the user will perform control co-design of the WEC geometry and a corresponding optimal controller to maximize electrical power. We build up to this problem in three parts of successive complexity:
We will start by loading the necessary modules:
Import Autograd (wrapper on NumPy, required) for automatic differentiation
Import other packages we will use in this tutorial
Import WecOptTool
[1]:
import numpy as np
import jax.numpy as jnp
import capytaine as cpy
from capytaine.io.meshio import load_from_meshio
import matplotlib.pyplot as plt
from scipy.optimize import brute
import wecopttool as wot
## set colorblind-friendly colormap for plots
plt.style.use('tableau-colorblind10')
1. Optimal control for maximum mechanical power
This example illustrates how to set up, run, and analyze a basic optimization problem using WecOptTool.
The objective of this example is to find the optimal PTO force time series that produces the most mechanical power subject to the WEC dynamics and a maximum force the PTO can exert.
WecOptTool requires the following to be defined to successfully run its optimization routines:
The wave environment
The WEC object, including all of its properties and constraints
The objective function
The graphic below shows all the requirements for this first part of the tutorial: the wave environment on the left, the WEC object(with its relevant subcomponents) in the blue box in the middle, and the objective function (mechanical power) on the right.

Waves and WEC geometry
The pseudo-spectral solution used in WecOptTool requires a specified set of frequencies to analyze. To model the WEC accurately, we need to ensure the set of selected frequencies captures the full hydrodynamic response range of the WEC.
Therefore, we start our WecOptTool model by defining this set of frequencies, the wave environment, and the mesh of the WEC geometry. This ensures the minimum wavelength in the selected frequencies is larger than the minimum wavelength that can be analyzed with the mesh using the Boundary Element Method (BEM), which we will do later. This is a good initial check to make sure the hydrodynamic properties results calculated with the BEM will be accurate.
Frequency selection
To start with a simple case in this tutorial, we are interested in modeling a regular wave at 0.3 Hz. In regular waves, the linear WEC system response will always occur at the wave frequency, with the nonlinear system response also occurring at the corresponding odd harmonics (3rd, 5th, etc.) of the wave frequency. Thus, we can set the fundamental frequency in our set, \(f_1\), equal to the wave frequency. Prior WaveBot analysis has found that the nonlinear dynamics are sufficiently captured with the 3rd, 5th, 7th, and 9th harmonics. WecOptTool assumes the spacing between frequencies equals the magnitude of \(f_1\). Therefore, we will model 10 frequencies to encompass these harmonics.
These frequencies will be used for the Fourier representation of both the wave and the desired PTO force in the pseudo-spectral problem. See the Theory section of the WecOptTool documentation for more details on the pseudo-spectral problem formulation.
It is important to use the lowest number of frequencies possible while still maintaining accuracy in order to minimize degrees of freedom and computation time for the optimization solver.
[2]:
wavefreq = 0.3 # Hz
f1 = wavefreq
nfreq = 10
freq = wot.frequency(f1, nfreq, False) # False -> no zero frequency
Waves
WecOptTool is configured to have the wave environment specified as a 2-dimensional xarray.DataArray containing the complex wave amplitudes (in meters), wave phases (in degrees), and directions (in degrees). We will use an amplitude of 0.0625 meters, a phase of 30 degrees, and direction 0 for this tutorial. The two coordinates are the radial frequency omega (in rad/s) and the direction wave_direction (in radians).
The xarray package has a pretty steep learning curve, so WecOptTool includes the waves module containing more intuitive functions that create xarray.DataArray objects for different types of wave environments. See the xarray documentation here if you are interested in learning more about the package. In this case, we will use the wecopttool.waves.regular_wave function with our wave frequency, amplitude, phase, and direction:
[3]:
amplitude = 0.0625 # m
phase = 30 # degrees
wavedir = 0 # degrees
waves = wot.waves.regular_wave(f1, nfreq, wavefreq, amplitude, phase, wavedir)
WEC geometry mesh
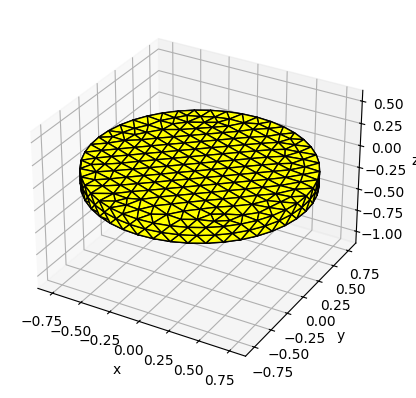
Now we will create a surface mesh for the WEC hull and store it using the FloatingBody object from Capytaine. The WaveBot mesh is pre-defined in the wecopttool.geom module, so we will call it directly from there. Note that the Capytaine from_meshio method can also import from other file types (STL, VTK, MSH, etc.), click here for the full list of compatible mesh file types.
We also apply an internal lid which helps eliminate irregular frequency spikes. The lid position was chosen by iterating through a series of mesh size factors and lid positions to move the frequency spikes above the range of interest. See the capytaine documentation here for more details.
[4]:
wb = wot.geom.WaveBot() # use standard dimensions
mesh_size_factor = 0.2 # 1.0 for default, smaller to refine mesh
mesh = wb.mesh(mesh_size_factor)
# create mesh object for WaveBot and add internal lid
mesh_obj = load_from_meshio(mesh, 'WaveBot')
lid_mesh = mesh_obj.generate_lid(-2e-2)
fb = cpy.FloatingBody(mesh=mesh_obj, lid_mesh=lid_mesh, name="WaveBot")
Info : [ 90%] Union - Splitting solids
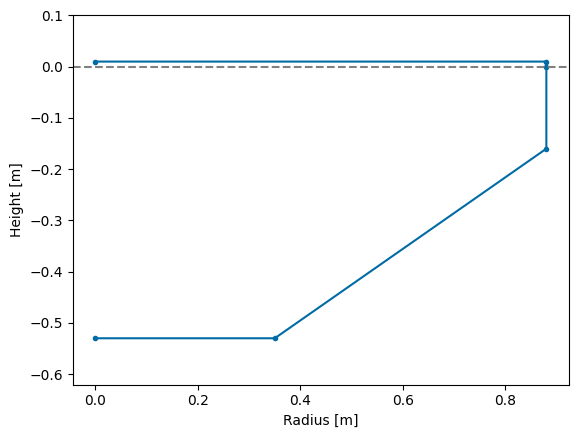
fb.show, and fb.show_matplotlib). These methods are interactive when used outside a Jupyter notebook.plot_cross_section.[5]:
fb.show_matplotlib()
_ = wb.plot_cross_section(show=True) # specific to WaveBot
Minimum wavelength check
With the frequency vector, wave environment, and geometry mesh all defined, we can now check to make sure they are all suitable to accurately simulate the WEC dynamics. The fb.minimal_computable_wavelength method checks the mesh to determine the minimum wavelength that can be reliably computed using Capytaine. We compare this value to the minimum wavelength our frequency vector will compute; we want this number to be larger than Capytaine’s minimum wavelength. A warning is printed if this is
not the case. This warning is ignored here because the BEM results have been validated, but can be used as a guide for mesh refinement to ensure accurate BEM results.
[6]:
min_computable_wavelength = fb.minimal_computable_wavelength
g = 9.81
min_period = 1/(f1*nfreq)
min_wavelength = (g*(min_period)**2)/(2*np.pi)
if min_wavelength < min_computable_wavelength:
print(f'Warning: Minimum wavelength in frequency spectrum ({min_wavelength}) is smaller'
f' than the minimum computable wavelength ({min_computable_wavelength}).')
Warning: Minimum wavelength in frequency spectrum (0.17347888797016595) is smaller than the minimum computable wavelength (0.3169814036372497).
WEC object
The WEC object in WecOptTool contains all the information about the WEC and its properties and dynamics. This constitutes the vast majority of the setup required to run a WecOptTool optimization. The WEC object handles three categories of data that are passed on to the optimizer:
The intrinsic impedance of the WEC
The WEC and PTO kinematic
The PTO dynamics
In order for the WEC object to be able to compute these data, we must provide information when we declare the object in the code. The required information includes:
Any additional loads (e.g. PTO force, mooring, non-linear hydrodynamics)
Device constraints
Again, we will keep things simple to start. We will only consider heave motion and assume a lossless PTO, and the WaveBot has trivial WEC-PTO kinematics (unity). We will apply one additional force (the PTO force on the WEC) and one constraint (the maximum PTO force), which we define below using the PTO class.
Degrees of freedom
The degrees of freedom can be added directly to the FloatingBody using the add_translation_dof and add_rotation_dof methods. The axis of rotation is automatically defined if the method is supplied a name of "Surge", "Sway", "Heave", "Roll", "Pitch", or "Yaw". We will only model the heave degree of freedom in this case.
[7]:
fb.add_translation_dof(name="Heave")
ndof = fb.nb_dofs
BEM solution
We can use the FloatingBody and frequency vector created earlier to run the Boundary Element Method solver in Capytaine to get the hydrostatic and hydrodynamic coefficients of our WEC object. This is wrapped into the wecopttool.run_bem function.
If you would like to save the BEM data to a NetCDF file for future use, uncomment the second line of the cell below to use the wot.write_netcdf function.
[8]:
bem_data = wot.run_bem(fb, freq)
# wot.write_netcdf('bem_data.nc', bem_data) # saves BEM data to file
WARNING:wecopttool.core:Using the geometric centroid as the center of gravity (COG).
[16:29:16] WARNING Using the geometric centroid as the center of gravity (COG).
WARNING:wecopttool.core:Using the center of gravity (COG) as the rotation center for hydrostatics. Note that the hydrostatics do not use the axes defined by the FloatingBody degrees of freedom, and the rotation center should be set manually when using Capytaine to calculate hydrostatics about an axis other than the COG.
WARNING Using the center of gravity (COG) as the rotation center for hydrostatics. Note that the hydrostatics do not use the axes defined by the FloatingBody degrees of freedom, and the rotation center should be set manually when using Capytaine to calculate hydrostatics about an axis other than the COG.
WARNING:wecopttool.core:FloatingBody has no inertia_matrix or mass field. The mass will be calculated based on a neutral buoyancy assumption. The inertia matrix will be calculated assuming a solid and constant density body.
WARNING FloatingBody has no inertia_matrix or mass field. The mass will be calculated based on a neutral buoyancy assumption. The inertia matrix will be calculated assuming a solid and constant density body.
WARNING:wecopttool.core:FloatingBody has no hydrostatic_stiffness field. Capytaine will auto-populate the hydrostatic stiffness based on the provided mesh.
WARNING FloatingBody has no hydrostatic_stiffness field. Capytaine will auto-populate the hydrostatic stiffness based on the provided mesh.
WARNING:capytaine.bem.solver:Mesh resolution for 6 problems:
The resolution of the mesh might be insufficient for omega ranging from 15.080 to 18.850.
This warning appears when the largest panel of this mesh has radius > wavelength/8.
WARNING Mesh resolution for 6 problems: The resolution of the mesh might be insufficient for omega ranging from 15.080 to 18.850. This warning appears when the largest panel of this mesh has radius > wavelength/8.
Next, we use the utilities class wecopttool.utilities, which has functions that help you analyze and design WECs, but are not needed for the core function of WecOptTool. For example, we calculate the WEC’s intrinsic impedance with its hydrodynamic coefficients and inherent inertial properties. We make use of wecopttool.add_linear_friction() to convert the bem_data into a dataset which contains all zero friction data, because wecopttool.check_radiation_damping() and
wecopttool.hydrodynamic_impedance() expect a data variable called ‘friction’.
The intrinsic impedance tells us how a hydrodynamic body responds to different excitation frequencies. For oscillating systems we are interested in both, the amplitude of the resulting velocity as well as the phase between velocity and excitation force. Bode plots are useful tool to visualize the frequency response function.
The natural frequency reveals itself as a trough in the intrinsic impedance for restoring degrees of freedom (heave, roll, pitch).
NOTE: we create a dedicated object for this plotting and do not reuse it beyond this purpose, as the add_linear_friction() and check_radiation_damping() methods will be automatically executed later on when we create our WEC object.
[9]:
bem_data_for_plotting = wot.add_linear_friction(bem_data, friction = None)
#we're not actually adding friction, but need the datavariables in bem_data_for_plotting
bem_data_for_plotting = wot.check_radiation_damping(bem_data_for_plotting)
intrinsic_impedance = wot.hydrodynamic_impedance(bem_data_for_plotting)
fig, axes = wot.utilities.plot_bode_impedance(intrinsic_impedance,
'WaveBot Intrinsic Impedance')
WARNING:wecopttool.core:Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
[16:30:35] WARNING Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)

PTO
WecOptTool includes the PTO class to encompass all properties of the power take-off system of the WEC. Data wrapped into our PTO class will be used to provide the additional force and constraint for our WEC object definition, as well as our optimization problem later.
To create an instance of the PTO class, we need:
The kinematics matrix, which converts from the WEC degrees of freedom to the PTO degrees of freedom. In this case, the PTO extracts power directly from the heaving motion of the WEC, so the kinematics matrix is simply a \(1 \times 1\) identity matrix.
The definition of the PTO controller. The
wecopttool.ptosubmodule includes P, PI, and PID controller functions that can be provided to thePTOclass and return the PTO force. However, we will be using an unstructured controller in this case, which is the default whencontroller=None.Any PTO impedance. We are only interested in mechanical power for this first problem, so we will leave this empty for now.
The non-linear power conversion loss (assumed 0% if
None)The PTO system name, if desired
[10]:
name = ["PTO_Heave",]
kinematics = np.eye(ndof)
controller = wot.controllers.unstructured_controller()
loss = None
pto_impedance = None
pto = wot.pto.PTO(ndof, kinematics, controller, pto_impedance, loss, name)
Now we define the PTO forcing on the WEC and the PTO constraints. We set the maximum PTO force as 750 Newtons. This value is chosen somewhat arbitrary to highlight different effects throughout this tutorial. In practice, the user would need to identify their limiting component in the PTO and then compute a suitable value. For example, if the generator drive has a maximal current \(I_{max}\) of 10 A, with a generator torque constant \(K_t\) of 8 Nm/A and a gear ratio \(N\) of 9 rad/m, this results in a max PTO linear force of \(F = N K_{t} I_{max} = 9\) rad/m \(\times 8\) Nm \(\times 10\) A \(= 720\) N.
We will enforce the constraint at 4 times more points than the dynamics; see Theory for why this is helpful for the pseudo-spectral problem. The constraints must be in the correct format for scipy.optimize.minimize, which is the solver WecOptTool uses. See the documentation for the solver here and note the matching syntax of ineq_cons below.
[11]:
# PTO dynamics forcing function
f_add = {'PTO': pto.force_on_wec}
# Constraint
f_max = 750.0
nsubsteps = 4
def const_f_pto(wec, x_wec, x_opt, wave): # Format for scipy.optimize.minimize
f = pto.force(wec, x_wec, x_opt, wave, nsubsteps)
return f_max - jnp.abs(f.flatten())
ineq_cons = {'type': 'ineq',
'fun': const_f_pto,
}
constraints = [ineq_cons]
WEC creation
We are now ready to create the WEC object itself! Since we ran the BEM already, we can define the object using the wecopttool.WEC.from_bem function. If we saved BEM data to a NetCDF file, we can also provide the path to that file instead of specifying the BEM Dataset directly.
[12]:
wec = wot.WEC.from_bem(
bem_data,
constraints=constraints,
friction=None,
f_add=f_add,
)
WARNING:wecopttool.core:Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
[16:30:36] WARNING Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
Note: You may receive a warning regarding negative linear damping values. By default, WecOptTool ensures that the BEM data does not contain non-negative damping values. If you would like to correct the BEM solution to a different minimum damping value besides zero, you can specify min_damping.
Objective function
The objective function is the quantity we want to optimize—in this case, the average mechanical power. The function to compute this can be taken directly from the PTO object we created:
[13]:
obj_fun = pto.mechanical_average_power
The objective function is itself a function of the optimization state x_opt. The length of x_opt, nstate_opt, needs to be properly defined to successfully call scipy.optimize.minimize. In other words, it should match the quantities we are interested in optimizing. In this case, we are optimizing for the control trajectories of an unstructured PTO, which can be represented in the Fourier domain by the DC (zero frequency) component, then the real and imaginary components for each
frequency.
[14]:
nstate_opt = 2*nfreq
One technical quirk here: nstate_opt is one smaller than would be expected for a state space representing the mean (DC) component and the real and imaginary Fourier coefficients. This is because WecOptTool excludes the imaginary Fourier component of the highest frequency (the 2-point wave). Since the 2-point wave is sampled at multiples of \(\pi\), the imaginary component is evaluated as \(sin(n\pi); n = 0, 1, 2, ..., n_{freq}\), which is always zero.
Solve
We are now ready to solve the problem. WecOptTool uses scipy.optimize.minimize as its optimization driver, which is wrapped into wecopttool.WEC.solve for ease of use.
The only required inputs for defining and solving the problem are:
The wave environment
The objective function
The size of the optimization state (
nstate_opt)
Optional inputs can be provided to control the optimization execution if desired, which we do here to change the default iteration maximum and tolerance. See the scipy.optimize.minimize documentation here for more details.
To help the problem converge faster, we will scale the problem before solving it (see the Scaling section of the Theory documentation). WecOptTool allows you to scale the WEC dynamics state, the optimization state, and the objective function separately. See the wecopttool.WEC.solve documentation here.
Pay attention to the Exit mode: an exit mode of 0 indicates a successful solution. A simple problem (linear, single degree of freedom, unconstrained, etc.) should converge in well under 100 iterations. If you exceed this, try adjusting the scales by orders of magnitude, one at a time.
[15]:
options = {'maxiter': 200}
scale_x_wec = 1e1
scale_x_opt = 1e-3
scale_obj = 1e-2
results = wec.solve(
waves,
obj_fun,
nstate_opt,
optim_options=options,
scale_x_wec=scale_x_wec,
scale_x_opt=scale_x_opt,
scale_obj=scale_obj,
)
opt_mechanical_average_power = results[0].fun
print(f'Optimal average mechanical power: {opt_mechanical_average_power} W')
Optimization terminated successfully (Exit mode 0)
Current function value: -0.48295373134379105
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
Optimal average mechanical power: -48.295373134379105 W
Analyzing results
We will use two post-processing functions to obtain frequency and time domain results for the WEC and PTO responses. The wec.post_process and pto.post_process functions both post-process the results for each wave phase realization. The pseudo-spectral method gives continuous in time results. To get smoother looking plots, we specify five subpoints betweeen co-location points.
[16]:
nsubsteps = 5
pto_fdom, pto_tdom = pto.post_process(wec, results, waves, nsubsteps=nsubsteps)
wec_fdom, wec_tdom = wec.post_process(wec, results, waves, nsubsteps=nsubsteps)
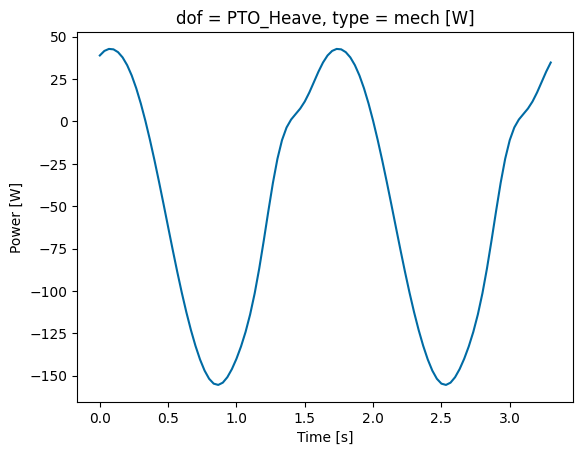
The pto.post_process function returns a list of xarray.Dataset objects, each element of which has built-in integration with PyPlot for smart plotting with automatic titles and formatting. We will plot the mechanical power (mech_power), position (pos), and the PTO force (force).
[17]:
plt.figure()
pto_tdom['power'].sel(realization=0, type='mech').squeeze().plot()
[17]:
[<matplotlib.lines.Line2D at 0x7f4b1a0e6690>]
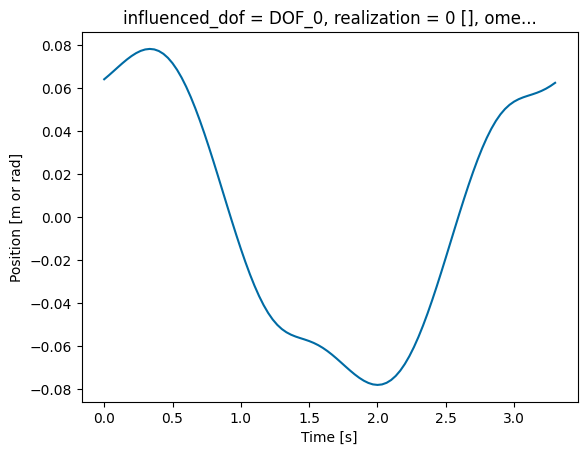
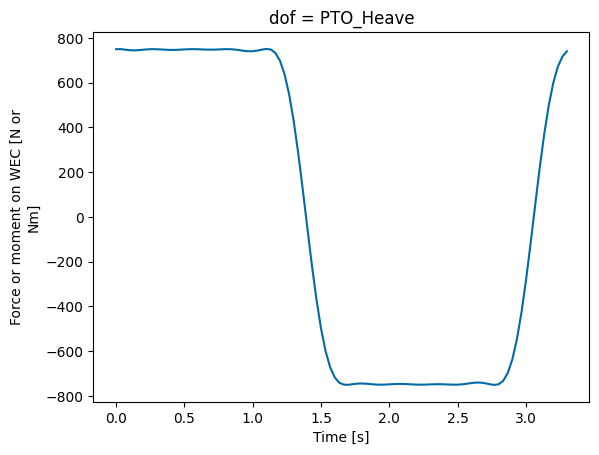
We could similarly plot any time or frequency domain response of the WEC or PTO by calling the specific type of response (position, velocity, force, etc.). For example, to plot the WEC heave position and PTO force:
[18]:
plt.figure()
wec_tdom.sel(realization=0)['pos'].plot()
plt.figure()
pto_tdom.sel(realization=0)['force'].plot()
[18]:
[<matplotlib.lines.Line2D at 0x7f4b1a36d1c0>]
Note that there are other dynamic responses available in the post-processed WEC and PTO variables (wec_tdom, pto_tdom, wec_fdom, pto_fdom). For example, the time domain PTO variable contains the following response:
[19]:
pto_tdom
[19]:
<xarray.Dataset> Size: 6kB
Dimensions: (realization: 1, time: 100, dof: 1, type: 2)
Coordinates:
* time (time) float64 800B 0.0 0.03333 0.06667 0.1 ... 3.2 3.233 3.267 3.3
* dof (dof) <U9 36B 'PTO_Heave'
* type (type) <U4 32B 'mech' 'elec'
Dimensions without coordinates: realization
Data variables:
pos (realization, time, dof) float64 800B ...
vel (realization, time, dof) float64 800B ...
acc (realization, time, dof) float64 800B ...
force (realization, time, dof) float64 800B ...
power (realization, type, time, dof) float64 2kB 42.47 43.72 ... 39.52
Attributes:
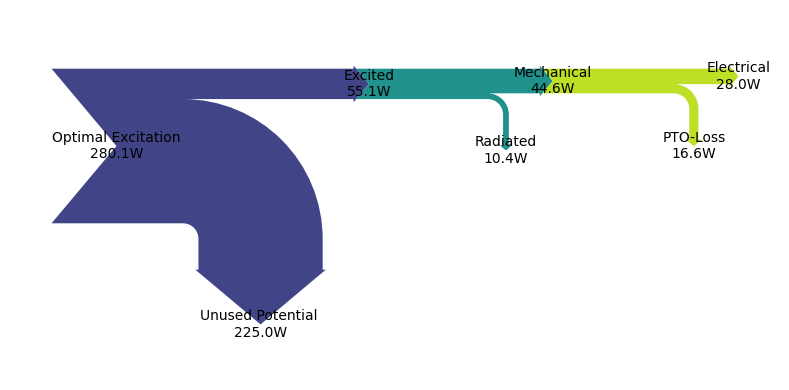
time_created_utc: 2026-03-02 16:30:38.018023Lastly, we will visualize the average power at different stages and how the power flows through the system.
[20]:
p_flows = wot.utilities.calculate_power_flows(wec,
pto,
results,
waves,
intrinsic_impedance)
wot.utilities.plot_power_flow(p_flows)
[20]:
(<Figure size 800x400 with 1 Axes>, <Axes: >)
[16:30:41] WARNING Ignoring fixed y limits to fulfill fixed data aspect with adjustable data limits.
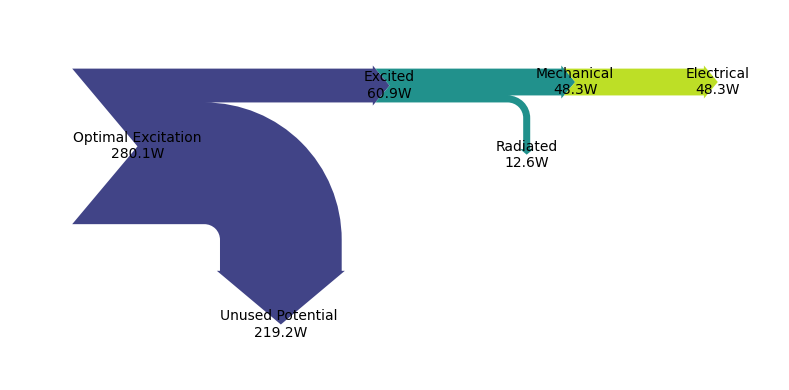
On the very left of the power flow Sankey diagram we start with the Optimal Excitation, which is only determined by the incident wave and the hydrodynamic damping and friction. In order for the actual Excited power to equal the Optimal Excitation the absorbed Mechanical power would need to equal the Radiated power (power that is radiated away from the WEC). In this case the Unused Potential would be zero. In other words, you can never convert more than 50% of the incident wave energy into kinetic energy. For more information on this we refer to Johannes Falnes Book - Ocean Waves and Oscillating System, specifically Chapter 6.
However, the optimal 50% absorption is an overly optimistic goal considering that real world systems are likely constrained in their oscillation velocity amplitude and phase, due to limitations in stroke and applicable force.
The PTO force constraint used in this optimization also stopped us from absorbing the maximal potential wave energy. It is notable that we absorbed approximately 3/4 of the maximal absorbable power (Mechanical / (1/2 Optimal Excitation)), with relatively little Radiated power (about 1/2 of the absorbed power). To also absorb the last 1/4 of the potential wave power, we would need to increase the Radiated power three times!!
A more important question than “How to achieve optimal absorption?” is “How do we optimize usable output power?”, i.e. Electrical power. For this optimization case we used a lossless PTO that has no impedance in itself. Therefore, the Electrical power equals the absorbed Mechanical power. We’ll show in the following sections that this a poor assumption and that the power flow looks fundamentally different when taking the PTO dynamics into account!!
2. Optimal control for maximum electrical power
The rest of this tutorial will focus on a different objective function: we will now optimize for electrical power rather than mechanical, as this is a form of power that is usable and transportable.
Since we are still dealing with the same WaveBot as in Part 1, we can reuse the BEM, WEC-PTO kinematics, and wave data from before.

The biggest difference when considering electrical power is the addition of the PTO dynamics. In other words, we no longer assume a lossless PTO. We will express the PTO dynamics in the form of a 2-port impedance model to incorporate the dynamics of the drivetrain and generator. The additional mechanical energy storage through the drivetrain is modeled using Newton’s second law, and we assume a linear generator using a power-invariant park transform.
The PTO impedance matrix components are then obtained under open-circuit conditions: no load current (\(i_{pto}\) in figure above) or no WEC velocity (\(vel_{pto}\) above), respectively. See Section II of Michelén et al. here for more details about how the code below is derived.
[21]:
## PTO impedance definition
omega = bem_data.omega.values
gear_ratio = 12.0
torque_constant = 6.7
winding_resistance = 0.5
winding_inductance = 0.0
drivetrain_inertia = 2.0
drivetrain_friction = 1.0
drivetrain_stiffness = 0.0
drivetrain_impedance = (1j*omega*drivetrain_inertia +
drivetrain_friction +
1/(1j*omega)*drivetrain_stiffness)
winding_impedance = winding_resistance + 1j*omega*winding_inductance
pto_impedance_11 = -1* gear_ratio**2 * drivetrain_impedance
off_diag = np.sqrt(3.0/2.0) * torque_constant * gear_ratio
pto_impedance_12 = -1*(off_diag+0j) * np.ones(omega.shape)
pto_impedance_21 = -1*(off_diag+0j) * np.ones(omega.shape)
pto_impedance_22 = winding_impedance
pto_impedance_2 = np.array([[pto_impedance_11, pto_impedance_12],
[pto_impedance_21, pto_impedance_22]])
Next, we will create a new PTO object with this impedance matrix. We will also update the definitions of our PTO constraint and additional dynamic forcing function to use the new object. We will again set our maximum PTO force to 750 Newtons in this example, so we do not need to redefine f_max.
[22]:
## Update PTO
name_2 = ['PTO_Heave_Ex2']
pto_2 = wot.pto.PTO(ndof, kinematics, controller, pto_impedance_2, loss, name_2)
## Update PTO constraints and forcing
def const_f_pto_2(wec, x_wec, x_opt, wave):
f = pto_2.force_on_wec(wec, x_wec, x_opt, wave, nsubsteps)
return f_max - jnp.abs(f.flatten())
ineq_cons_2 = {'type': 'ineq', 'fun': const_f_pto_2}
constraints_2 = [ineq_cons_2]
f_add_2 = {'PTO': pto_2.force_on_wec}
Finally, we will update our WEC object with the new PTO and objective function, then run our optimization problem. Note we are now using average_power instead of mechanical_average_power as our objective function.
[23]:
# Update WEC
wec_2 = wot.WEC.from_bem(bem_data,
constraints=constraints_2,
friction=None,
f_add=f_add_2
)
# Update objective function
obj_fun_2 = pto_2.average_power
# Solve
scale_x_wec = 1e1
scale_x_opt = 1e-3
scale_obj = 1e-2
results_2 = wec_2.solve(
waves,
obj_fun_2,
nstate_opt,
scale_x_wec=scale_x_wec,
scale_x_opt=scale_x_opt,
scale_obj=scale_obj,
)
opt_average_power = results_2[0].fun
print(f'Optimal average electrical power: {opt_average_power} W')
# Post-process
wec_fdom_2, wec_tdom_2 = wec_2.post_process(wec_2, results_2, waves, nsubsteps)
pto_fdom_2, pto_tdom_2 = pto_2.post_process(wec_2, results_2, waves, nsubsteps)
WARNING:wecopttool.core:Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
[16:30:42] WARNING Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
Optimization terminated successfully (Exit mode 0)
Current function value: -0.28000388653913044
Iterations: 10
Function evaluations: 10
Gradient evaluations: 10
Optimal average electrical power: -28.000388653913042 W
We will compare our optimal results to the unconstrained case to gain some insight into the effect of the constraint on the optimal PTO force. Let’s do the same process as before, but unset the constraints parameter in a new WEC object.
[24]:
wec_2_nocon = wot.WEC.from_bem(
bem_data,
constraints=None,
friction=None,
f_add=f_add_2)
results_2_nocon = wec_2_nocon.solve(
waves,
obj_fun_2,
nstate_opt,
scale_x_wec=scale_x_wec,
scale_x_opt=scale_x_opt,
scale_obj=scale_obj,
)
opt_average_power = results_2_nocon[0].fun
print(f'Optimal average electrical power: {opt_average_power} W')
wec_fdom_2_nocon, wec_tdom_2_nocon = wec_2_nocon.post_process(
wec_2_nocon, results_2_nocon, waves, nsubsteps)
pto_fdom_2_nocon, pto_tdom_2_nocon = pto_2.post_process(
wec_2_nocon, results_2_nocon, waves, nsubsteps)
WARNING:wecopttool.core:Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
[16:30:44] WARNING Linear damping for DOF "Heave" has negative or close to zero terms. Shifting up damping terms [9] to a minimum of 1e-06 N/(m/s)
Optimization terminated successfully (Exit mode 0)
Current function value: -0.2918490021417063
Iterations: 13
Function evaluations: 15
Gradient evaluations: 13
Optimal average electrical power: -29.18490021417063 W
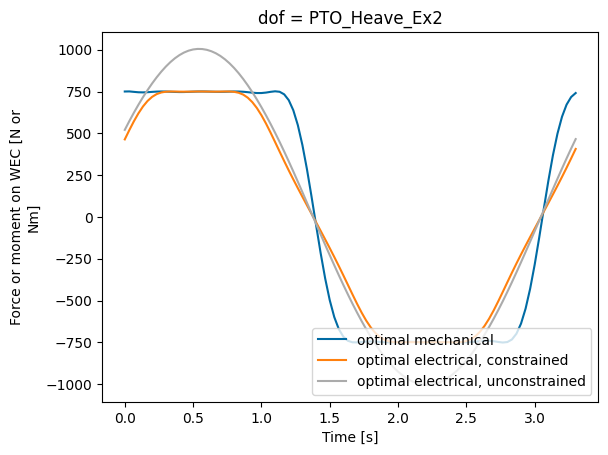
Note that the optimal constrained PTO force follows the optimal unconstrained solution (sinusoidal) whenever the unconstrained solution is within the constraint. When the constraint is active the optimal PTO force is the maximum PTO force of 750 Newtons.
[25]:
plt.figure()
wec_tdom.sel(realization=0)['pos'].plot(label='optimal mechanical')
wec_tdom_2.sel(realization=0)['pos'].plot(label='optimal electrical, constrained')
wec_tdom_2_nocon.sel(realization=0)['pos'].plot(label='optimal electrical, unconstrained')
plt.legend(loc='lower right')
plt.figure()
pto_tdom.sel(realization=0)['force'].plot(label='optimal mechanical')
pto_tdom_2.sel(realization=0)['force'].plot(label='optimal electrical, constrained')
pto_tdom_2_nocon.sel(realization=0)['force'].plot(label='optimal electrical, unconstrained')
plt.legend(loc='lower right')
plt.figure()
pto_tdom.sel(realization=0)['power'].sel(type='mech').plot(label='optimal mechanical')
pto_tdom_2.sel(realization=0)['power'].sel(type='elec').plot(label='optimal electrical, constrained')
pto_tdom_2_nocon.sel(realization=0)['power'].sel(type='elec').plot(label='optimal electrical, unconstrained')
plt.legend(loc='lower right')
[25]:
<matplotlib.legend.Legend at 0x7f4b19ff79b0>
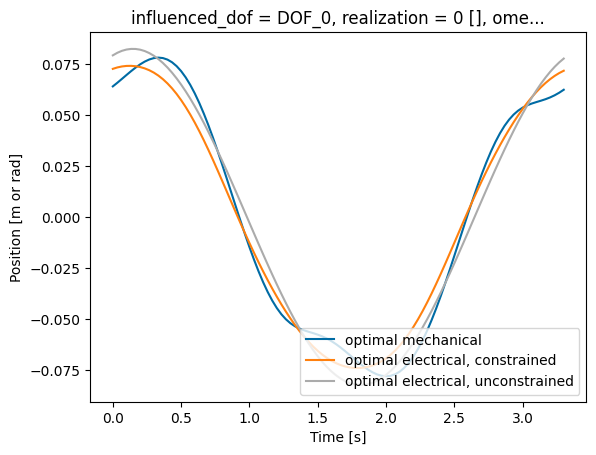
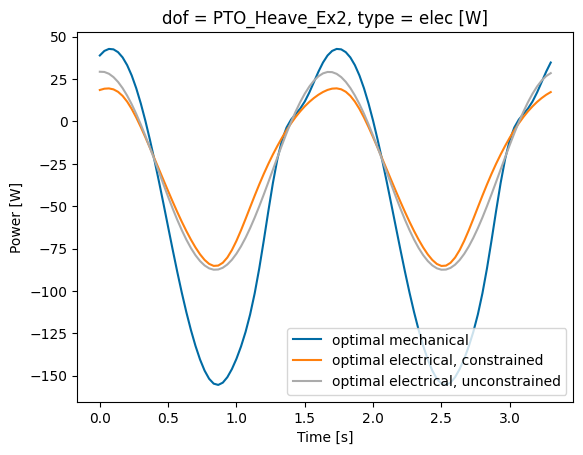
The attentive user might have noticed that the amplitude of the mechanical power is less compared to Part 1 of the tutorial. We can see that optimizing for electrical power requires optimal state trajectories with less reactive mechanical power (i.e. power that is put into the system).
The PTO force trajectory for optimizing mechanical power is saturated at the maximum for longer compared to the electrical power. This could inform the WEC designer optimizing for mechanical power to consider larger components that would not be utilized at their limit as frequently. However, the electrical power (not the mechanical power) is the usable form of power, thus designing the WEC for optimal electrical power does not indicate a need for larger components and prevents this over-design.
The Sankey power flow diagram confirm this observation.
[26]:
p_flows_2 = wot.utilities.calculate_power_flows(wec_2, pto_2, results_2, waves, intrinsic_impedance)
wot.utilities.plot_power_flow(p_flows_2)
[26]:
(<Figure size 800x400 with 1 Axes>, <Axes: >)
[16:30:46] WARNING Ignoring fixed x limits to fulfill fixed data aspect with adjustable data limits.
WARNING Ignoring fixed y limits to fulfill fixed data aspect with adjustable data limits.
3. Control co-design of the WEC geometry for maximum electrical power
The first two examples only used the inner optimization loop in WecOptTool to optimize PTO power. In Part 3, we bring it all together and show how to use both the inner and outer optimization loops in WecOptTool to do control co-optimization of a hull design in conjunction with an optimal controller for electrical power.
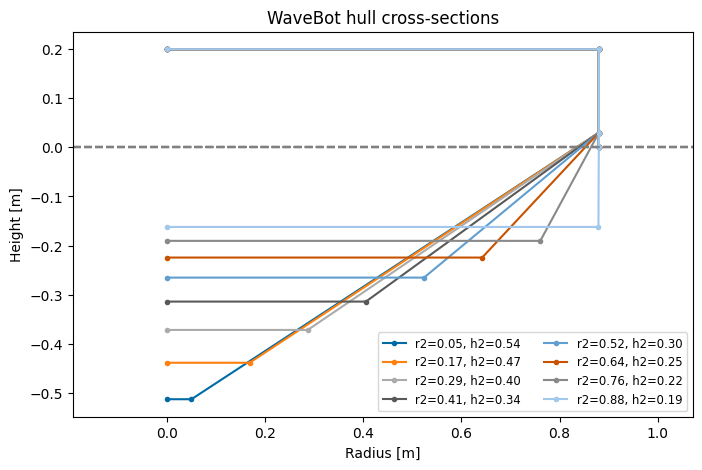
Again, we use the WaveBot WEC in one degree of freedom in regular waves. The goal is to find the optimal keel radius (r2) that maximizes the average produced electrical power, while maintaining a constant hull volume. A constant volume is achieved by setting the height of the conical section (h2) in conjunction with the keel radius.
This example demonstrates a complete case of the control co-optimization studies WecOptTool is meant for. The inner optimization loop finds the control trajectory that produces the optimal PTO force for a given hull geometry, and the outer optimization loop finds the optimal hull geometry amongst designs with optimal control trajectories.
The inner loop is consolidated into the WEC.solve() method, but the outer loop needs to be configured by the user for their particular design problem. In this example, we will do a simple brute force optimization using scipy.optimize.brute (click here for documentation).


Problem setup
First, we define a function for h2 based on r1 that maintains a constant volume. We see that, as expected, smaller values of r2 require larger values of h2 in order to maintain a constant hull volume.
[27]:
r1 = 0.88
r2_0 = 0.35
h2_0 = 0.37
V0 = 1/3*np.pi*h2_0*(r1**2+r2_0**2+(r1*r2_0))
r2_vals = np.linspace(0.05, 0.88*0.999, 8, endpoint=True)
def h2_from_r2(r2, V=V0, r1=r1):
h2 = V/(1/3*np.pi*(r1**2+r2**2+(r1*r2)))
return h2
# plot
mapres = map(h2_from_r2, r2_vals)
h2_vals = list(mapres)
fig1, ax1 = plt.subplots(figsize=(8,5))
for r2, h2 in zip(r2_vals.tolist(), h2_vals):
_ = wot.geom.WaveBot(r2=r2, h2=h2, freeboard=0.2).plot_cross_section(
ax=ax1, label=f"r2={r2:.2f}, h2={h2:.2f}")
ax1.legend(loc='best', fontsize='small',ncol=2)
_ = ax1.set_title('WaveBot hull cross-sections')
Next we will define an objective function for our design optimization problem. We use the same workflow used in Part 2 to set up a WaveBot device and solve for the optimal solution, but wrap this in a function definition which sets r2 and (indirectly) h2.
[28]:
def design_obj_fun(x):
# Unpack geometry variables
r2 = x[0]
h2 = h2_from_r2(r2)
print(f"\nr2 = {r2:.2f}:")
# Set up Capytaine floating body
wb = wot.geom.WaveBot(r2=r2, h2=h2)
mesh = wb.mesh(mesh_size_factor=0.5)
fb = cpy.FloatingBody.from_meshio(mesh, name="WaveBot")
fb.add_translation_dof(name="Heave")
ndof = fb.nb_dofs
# Run BEM
f1 = 0.05
nfreq = 50
bem_data = wot.run_bem(fb, freq)
bem_data = wot.add_linear_friction(bem_data, friction = None)
bem_data = wot.check_radiation_damping(bem_data)
# Impedance definition
omega = bem_data.omega.values
gear_ratio = 12.0
torque_constant = 6.7
winding_resistance = 0.5
winding_inductance = 0.0
drivetrain_inertia = 2.0
drivetrain_friction = 1.0
drivetrain_stiffness = 0.0
drivetrain_impedance = (1j*omega*drivetrain_inertia +
drivetrain_friction +
1/(1j*omega)*drivetrain_stiffness)
winding_impedance = winding_resistance + 1j*omega*winding_inductance
pto_impedance_11 = -1* gear_ratio**2 * drivetrain_impedance
off_diag = np.sqrt(3.0/2.0) * torque_constant * gear_ratio
pto_impedance_12 = -1*(off_diag+0j) * np.ones(omega.shape)
pto_impedance_21 = -1*(off_diag+0j) * np.ones(omega.shape)
pto_impedance_22 = winding_impedance
pto_impedance_3 = np.array([[pto_impedance_11, pto_impedance_12],
[pto_impedance_21, pto_impedance_22]])
# Set PTO object
name = ["PTO_Heave",]
kinematics = np.eye(ndof)
efficiency = None
controller = None
pto = wot.pto.PTO(ndof, kinematics, controller, pto_impedance_3, efficiency, name)
# Set PTO constraint and additional dynamic force
nsubsteps = 4
f_max = 750.0
def const_f_pto(wec, x_wec, x_opt, wave):
f = pto.force(wec, x_wec, x_opt, wave, nsubsteps)
return f_max - jnp.abs(f.flatten())
ineq_cons = {'type': 'ineq', 'fun': const_f_pto}
constraints = [ineq_cons]
f_add = {'PTO': pto.force_on_wec}
# Create WEC
wec = wot.WEC.from_bem(bem_data,
constraints=constraints,
friction=None,
f_add=f_add,
)
# Objective function
obj_fun = pto.average_power
nstate_opt = 2*nfreq
# Solve
scale_x_wec = 1e1
scale_x_opt = 1e-3
scale_obj = 1e-2
res = wec.solve(
waves,
obj_fun,
nstate_opt,
scale_x_wec=scale_x_wec,
scale_x_opt=scale_x_opt,
scale_obj=scale_obj)
return res[0].fun
Solve
Finally, we call our wrapped function using scipy.optimize.brute. The optimization algorithm will call our objective function, which in turn will create a new WaveBot hull, run the necessary BEM calculations for the hull, and find the PTO force that provides the most electric power for that hull. This process will be conducted for the range of r2 values that we specify.
(note: the cell below will take longer to run than the cells above, up to several minutes)
[29]:
wot.set_loglevel("error") # Suppress warnings
# range over which to search
ranges = (slice(r2_vals[0], r2_vals[-1]+np.diff(r2_vals)[0], np.diff(r2_vals)[0]),)
# solve
opt_x0, opt_fval, x0s, fvals = brute(func=design_obj_fun, ranges=ranges, full_output=True, finish=None)
r2 = 0.05:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.27987163823363753
Iterations: 10
Function evaluations: 11
Gradient evaluations: 10
r2 = 0.17:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.2798132978900738
Iterations: 10
Function evaluations: 11
Gradient evaluations: 10
r2 = 0.29:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.2799412113129179
Iterations: 10
Function evaluations: 11
Gradient evaluations: 10
r2 = 0.41:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.2802085742875031
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
r2 = 0.52:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.28069491642993505
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
r2 = 0.64:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.28162365005863976
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
r2 = 0.76:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.28344035084054925
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
r2 = 0.88:
Info : [ 90%] Union - Splitting solids
Optimization terminated successfully (Exit mode 0)
Current function value: -0.2873977008577283
Iterations: 11
Function evaluations: 11
Gradient evaluations: 11
Results
From a quick plot of the results, we see that the power absorption (where negative power is power absorbed by the device) generally improves for larger values of r2.
[30]:
fig, ax = plt.subplots()
colors = plt.rcParams['axes.prop_cycle'].by_key()['color'][:len(x0s)]
ax.plot(x0s, fvals, 'k', zorder=0)
ax.scatter(x0s, fvals, c=colors, zorder=1)
ax.set_xlabel('Keel radius, $r_2$ [m]')
ax.set_ylabel('Average Power [W]')
ax.set_title('Design optimization results')
fig.tight_layout()
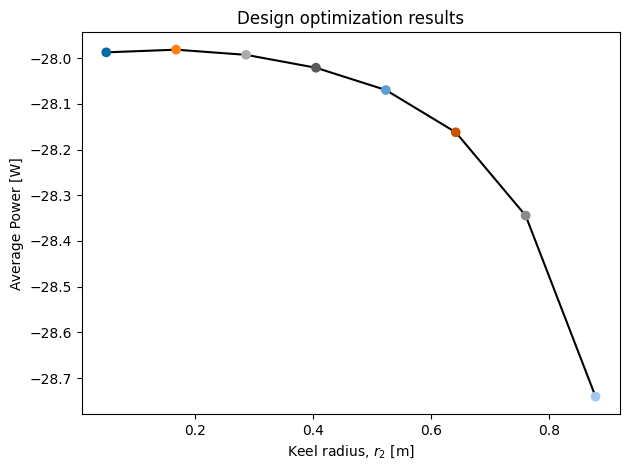
Note that in this case the difference in average power between the different keel radii is rather small. This is because the PTO force constraint is active most of the time, therefore all considered geometries perform similarly. If you remove the PTO constraint and re-run the co-optimization study, you will see that the impact of radius on average electrical power is significantly higher.